Универсальный планетоход-исследователь шагающего типа
Номинация: Лучшее конструкторское решение
Проект «Универсальный планетоход-исследователь шагающего типа» выполнен: Назаровым Артемом – (9класс), Воробьевым Тимуром (9 класс) и Гордеевым Алексеем (закончил школу). Руководитель проекта Колесников Игорь Александрович.
Проект «Универсальный планетоход-исследователь шагающего типа» выполнен: Назаровым Артемом – (9класс), Воробьевым Тимуром (9 класс) и Гордеевым Алексеем (закончил школу). Руководитель проекта Колесников Игорь Александрович.
Проект «Универсальный планетоход-исследователь шагающего типа» выполнен: Назаровым Артемом – (9класс), Воробьевым Тимуром (9 класс) и Гордеевым Алексеем (закончил школу). Руководитель проекта Колесников Игорь Александрович.
Проект «Универсальный планетоход-исследователь шагающего типа» выполнен: Назаровым Артемом – (9класс), Воробьевым Тимуром (9 класс) и Гордеевым Алексеем (закончил школу). Руководитель проекта Колесников Игорь Александрович.
Муниципальное общеобразовательное учреждение «Гимназия № 9» (Курганская область, г. Шадринск).
За основу нашего варианта проекта «Планетоход исследователь шагающего типа» мы взяли прототип марсианского треножника из известного романа Г. Уэллса «Война миров», где подробно описаны характеристики шагающих машин:
• шагающие технические системы отличало отсутствие колес и подобных им деталей;
• все их соединения представляли собой сложную систему скользящих, механизмов двигающихся на небольших, но искусно изогнутых подшипниках;
• все длинные рычажные соединения приводились в движение механизмами, похожими на мускулатуру;
• движение треножников были сложными и быстрыми;
• машины могли находиться в автоматическом режиме работы;
• в их программу входили как производственные функции, то есть создание и обслуживание других машин, так и боевые, то есть уничтожение различных объектов и противника при помощи теплового луча и отравляющего газа;
• они могли издавать звуковой сигнал,
и т.д.
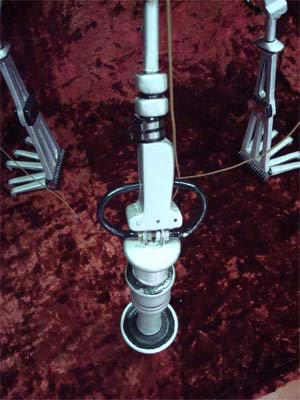
В своем варианте шагающего планетохода-исследователя мы постарались повторить особенности конструкции машин предложенных Г. Уэллсом. Так эллиптический корпус нашего планетохода опирается на три ведущих конечности, одна из которых редуцирована в универсальный бур, предназначенный для взятия проб грунта, для разрушения препятствий, а так же может быть использована в качестве дополнительной опоры. Две другие представляют собой аналог пятипалых конечностей животных позволяющих максимально увеличивать силу сцепления с поверхностью за счет регулируемых опорных фаланг, а так же изменять местоположение корпуса аппарата под разными углами и в различных плоскостях.
Планетоход оснащен локационной системой ориентации представленной виде гибких жгутов, на концах которых размещаются лазерные датчики, считывающие информацию об окружающей обстановке. Модель представленного планетохода - это бионическая техническая система будущего. В ее головной части будет помещен мощный компьютер, способный быстро оценивать поступающую информацию, гибко корректировать расчеты, внося «на ходу» необходимые поправки. По команде с Земли такой шагающий робот отправится на исследование сложной пересеченной местности планеты. При необходимости, останавливаясь и исследуя интересующие ученых объекты, ведя съемку, делая замеры, ища признаки жизни и многое другое. Представляемая модель аппарата-исследователя, воплотив в своей конструкции черты живых существ, будет первой искрой искусственного интеллекта, став при этом одновременно и продуктом техносферы, и продуктом биосферы, и продуктом ноосферы.
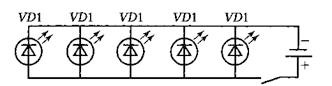
Для улучшения декоративного оформления планетохода по диаметру его эллиптического корпуса вмонтирована электрическая цепь, состоящая из пяти мигающих светодиодов, такими же светодиодами оснащен головной прожектор и передающая антенна. Для большей светоотдачи все светодиоды подключены по схеме разветвленной электрической цепи (рис. 1).
По мимо этого в верхней части корпуса планетохода установлен звуковой сигнализатор, который дает короткие звуковые сигналы с паузами в 0.3 ... 0,6 с.
Сигнализатор состоит из двух мультивибраторов. Один из них (на транзисторах VT1 и VT2) служит нагрузкой другого (на транзисторах VT3 и VT4). Второй мультивибратор отличается от первого большей емкостью конденсатора обратной связи С4. Поэтому его частота сравнительно низкая - около 1 Гц. С этой частотой первый мультивибратор подключается источнику питания на 0,2... 0,3 с, и в течение этого времени головка издает звук. Но работа этого устройства будет возможна лишь при разомкнутых гнездах разъема XI.
В исходном же режиме к разъему подключен охранный шлейф (Рис. 2).
Портал журнала «Наука и жизнь» использует файлы cookie и рекомендательные технологии.
Продолжая пользоваться порталом, вы соглашаетесь с хранением и использованием
порталом и партнёрскими сайтами файлов cookie и рекомендательных технологий на вашем устройстве.
Подробнее