Автор: Попко Екатерина Сергеевна. Наставник: Попко Кирилл Сергеевич Город: Курганинск Место учебы: МАОУ «Средняя общеобразовательная школа №2»
В настоящее время для исследования территорий на других планетах, и в военных целях используют одиночных роботов. Проблема состоит в том, что в случае поломки устройства или неисправности его механизмов, приходится менять его на такого же дорогостоящего или прекращать миссию. Поэтому актуальность работы состоит в том, чтобы вместо одного большого робота использовать группу маленьких. Такие роботы будут иметь меньшее количество функций, но объединяясь, смогут выполнять задачи не-посильные одному роботу, например исследования больших территорий за ограниченное время. При утрате нескольких членов коллектива, группа не несет технических и механических потерь. Роботы действуют по принципу пчелиного роя или муравейника.
Таким образом, цель работы состоит в том, чтобы создать группу роботов, взаимодействующих между собой. Для этого нужно решить ряд задач:
1. Изучить литературу по коллективному поведению роботов и коллективному поведению насекомых;
2. Выявить основные типы поведения насекомых;
3. Собрать роботов;
4. Провести испытания.
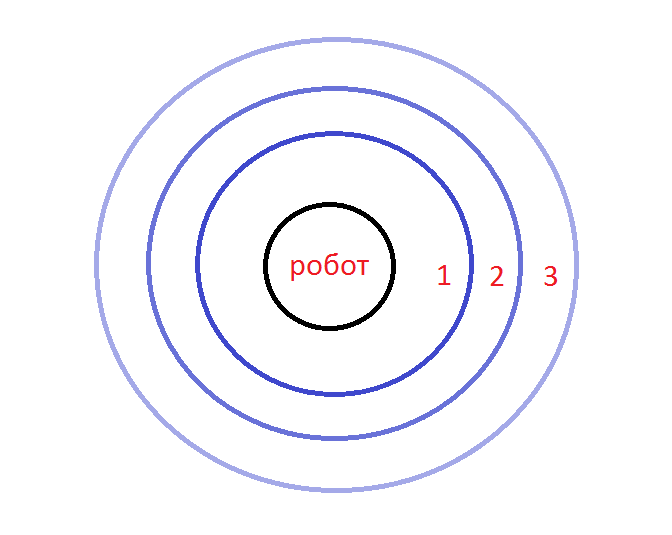
Основными элементами робота являются: оптические датчики (ОД), ультразвуковой датчик (УЗД), микроконтроллер (МК), драйвер двигателей и моторы. ОД используются для поддержания связи с другими роботами. Робот имеет три уровня обнаружения соседей: 1 – слишком близкое расстояние до соседа, 2 –оптимальное расстояние до соседа, 3 – далекое расстояние (рисунок 1). УЗД для обнаружения препятствий.
Предполагаемый алгоритм действия роботов.
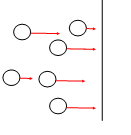
При движении, каждый робот подает световой сигнал, принимая его, роботы распознают соседей и едут за ними. Движущийся впереди всех робот – главный (рисунок 2).
Возможны два случая коллективного поведения.
1. Движение стаи за главным роботом. Расположив роботов беспорядочно, все крайне стоящие роботы являются главными. Они движутся в разные стороны. В это время, внутри группы роботы образуют коллектив. Отъезжающие в разные стороны главные роботы, понимая, что отдаляются от сигналов, внутри стоящих роботов, останавливаются и поворачиваются на месте до обнаружения сигнала коллектива, затем начинают двигаться за ним.
2. Коллективный объезд препятствия. Если препятствие небольшое, то часть роботов объезжает его, а часть останавливается (рисунок 3). Остановившиеся подают сигнал об обнаружении препятствия. Сзади идущие роботы, приняв от них сигнал, начинают поворачивать в сторону объезжающих. Остановившиеся поворачиваются на месте до обнаружения сигнала о направлении дальнейшего движения от движущихся.
Если препятствие большое и все идущие впереди роботы не объезжают его, то они останавливаются, поворачиваются и начинают двигаться в другую сторону (рисунок 4).
Современное состояние проблемы. Применение коллективного поведения насекомых нашли ученые из университета Карлсруэ в Германии. А так же компании: SwarmRobot , Swarmanoid, Nissan и корпорация Lockheed Martin. Большинство из разработок научных групп способны имитировать поведенческие модели стаи рыб, пчел, муравьев, избегать препятствия и столкновения друг с другом и способны двигаться целенаправленно.
Перспективы проекта: результатом научной работы должна стать разработка технологии коллективного взаимодействия роботов. Эта технология может найти применение в космических исследовательских миссиях, в военных целях, логистике (организация движения производственного транспорта, людских потоков в торговых центрах и иных общественных местах), оптимизация дорожного движения.
Полученные данные: собран стендовый робот (рисунки 5), разработан алгоритм коллективного поведения.
Вывод: в ходе выполнения работы проведены испытания, которые выявили недостатки робота: датчики препятствий работают на маленьком расстоянии. Решением послужило программирование микроконтроллера с целью увеличения чувствительности датчиков. В будущем планируется заменить оптические датчики на ультразвуковые для обнаружения препятствий, а оптические сенсоры использовать для связи роботов между собой, добавить радиоуправление, установить видео камеру.
Портал журнала «Наука и жизнь» использует файлы cookie и рекомендательные технологии.
Продолжая пользоваться порталом, вы соглашаетесь с хранением и использованием
порталом и партнёрскими сайтами файлов cookie и рекомендательных технологий на вашем устройстве.
Подробнее